- 詳細解説
- 業界別IoTシステムの活用例
第5回
スマホ化するクルマ、ソフトで機能が増えるSDV
スマートフォンのようにユーザー自身が機能を変更・追加することで価値が向上していくクルマ「ソフトウェア定義型車両(SDV)」が市場投入されるようになりました。
今回は、SDVが普及することによって自動車メーカーのビジネスモデルが「モノづくり」から「コトづくり」へと変化していく可能性や、車載情報システムの構成の未来などについて解説します。

快適性や利便性、さらには安全性や走る・曲がる・止まるといった基本機能まで、自動車に搭載する多様な機能をソフトウェアで実現したクルマが、米Teslaや中国企業などから市場に投入されるようになりました。こうした新たなシステム構築コンセプトに基づくクルマは、「ソフトウェア定義型車両(Software Defined Vehicle:SDV)」と呼ばれています。
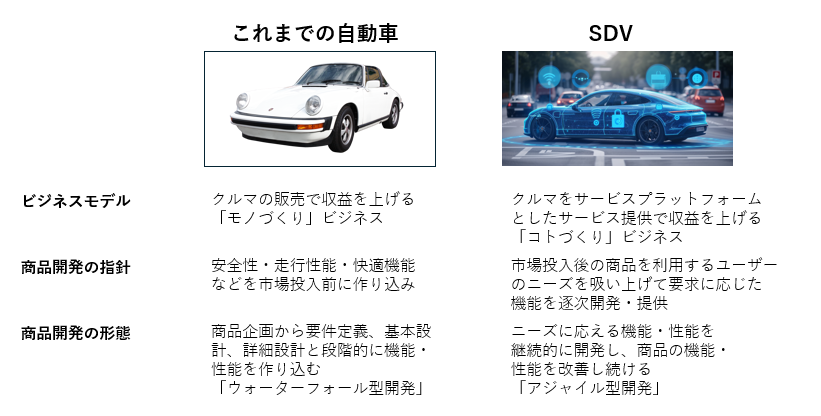
SDVは、スマートフォンのようにユーザー自身が機能を変更・追加することで価値が向上していきます。これまでとはシステム構成も商品特性も異なるクルマであり、その普及により、自動車メーカーのビジネスモデルが「モノづくり」から「コトづくり」へと大きく変化する可能性があります。クルマの機能の開発形態も、従来の「ウォーターフォール型」から「アジャイル型」へと変わっていくことになりそうです。
スマホ化していく近未来のクルマ
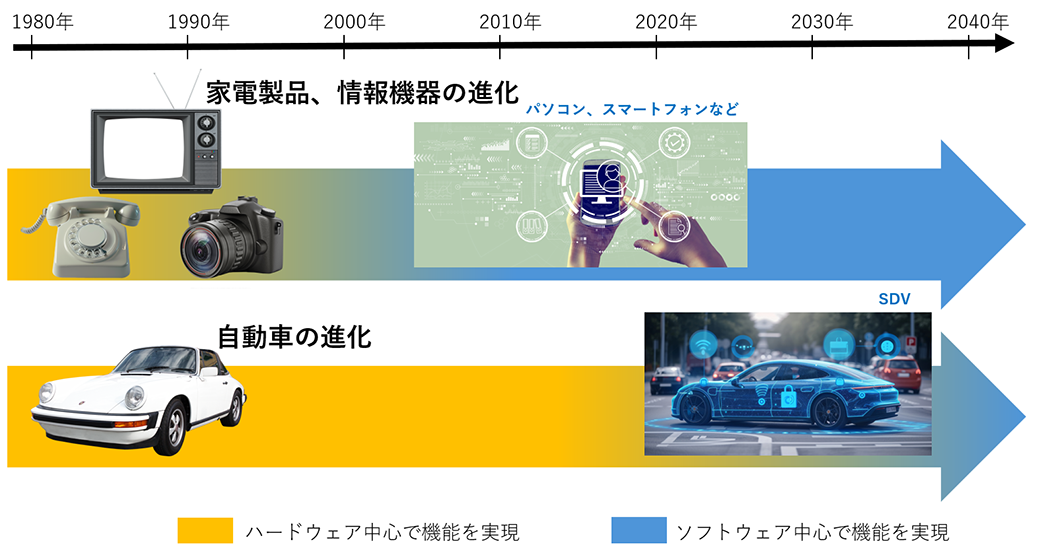
パソコンやスマートフォンなどの情報機器は、今や私たちの生活に欠かせない必需品ですが、これらの機器には、以前の工業製品とは決定的に異なる商品特性があります。それは製品を販売した後でも、ユーザーが利用する段階でソフトを追加・更新することによって機能や性能を向上できる点です。
デジタルネイティブ世代ならば、「新しいアプリをインストールすれば機能・性能を向上できるのは当たり前」と感じるかもしれません。しかし、少なくとも1980年代までに一般消費者向けに販売されていた家電製品や情報機器は、機能や性能が古くなって不便を感じた場合、新製品に買い換えるしか手立てがありませんでした。従来のクルマも、まさにそうした商品であったと言えます。
ところが現在、自動車は、パソコンやスマホのようにソフトの追加・更新ができる商品へと進化しつつあります。
Teslaは、2010年代から「販売後のクルマの機能・性能を、オンラインでアップデートする」と明言しており、実際に自動運転システム「FSD(Full Self Driving)」のオプションを1万5000米ドルで提供しています。
FSD機能を利用したいユーザーは、「Over the Air(OTA)」と呼ばれる無線通信によるソフト更新機能を利用して、自動運転用ソフトをインストールできます。ハードウェア(高性能なコンピュータや制御対象となるカメラ、センサーなど)は、販売時点で搭載されているため、ユーザーは更新サービスを契約すれば、すぐにソフトをダウンロードして、新機能を利用できます。
同様の仕組みは、中国の上海蔚来汽車(NIO)や小鵬汽車(Xpeng)なども採用しており、搭乗時に「ドアを開けて」と言えば、音声認識技術で自動的にドアを開ける機能などがソフトで追加できるようになっています。

自動運転車は、SDVでなければ実現できない
世界中の自動車メーカーのほぼすべてが、将来市場投入するクルマをSDV化する方向で技術開発を進めています。オーディオやカーナビゲーションなどのインフォテインメントシステムだけでなく、自動ブレーキなどの安全機能や走る・曲がる・止まるといった自動車の基本機能に至るまで、対象は広範な領域に及びます。
なぜ今、自動車業界の各企業は、クルマをSDVへと進化させようとしているのでしょうか。最大のモチベーションは、CASEトレンド、すなわち「コネクテッド」「自動化」「シェアリング & サービス」「電動化」の4軸に沿ってクルマやモビリティビジネスを進化させようとすると、必然的にSDV化が求められてくることにあります。
これから自動運転技術が発達していけば、自動車に求められる価値は、運転する楽しみを演出する“走行性能”から、移動中の時間を快適かつ有効に過ごすための“体験価値”へと移っていくことが予想されます。クルマの利便性・快適性を高める機能やエンタテインメント系の機能の重要性は、これまで以上に高まることは必然です。SDVならば、ユーザーの好みに合わせた機能をパーソナライズして搭載できます。
また、安全な自動運転車を実現するためには、SDVのような頻繁に機能・性能を向上できる仕組みの導入が必須になります。現時点では、自動運転機能を使用することができるのは、歩行者がいない自動車専用道路に限定されています。これは、あらかじめ走行中に起こりうることが想定でき、工場出荷前に安全性を作り込むことができる走行環境しか対象にできないからです。
人と自動車が共存する一般道では、自動車メーカーのエンジニアがどんなに知恵を絞っても想定し切れない状況に直面する可能性があります。そのため、完全自動運転車を市場投入する前に、まずはドライバーの安全運転を支援するシステム「ADAS(Advanced driver-assistance systems)」を運用し、さまざまな走行環境やシーンに関するデータをクラウド上に収集し、クルマにフィードバックして自動運転のレベルを高めていきます。こうした市場からのデータ収集や市場投入後のシステムへの開発成果のフィードバックを伴う改善作業は、SDVでなければ実現できません。
SDVによって変わる自動車ビジネスのあり方
SDVは、クルマの機能や性能を常に最新の状態に維持できるようになります。この点をユーザー視点から解釈すれば、自動車メーカー各社には、より多くの頻度でユーザーにとって魅力的な機能を提案することが求められるようになります。ユーザーにソフトのメンテナンスの質と量で満足感を得てもらうために、必然的に自動車メーカーのソフト開発部門は強化されていくことでしょう。特にアフターマーケット向けのアプリケーション開発への注力が進むと思われます。
スマホは、頻繁に行われる新機能を追加したOSのリリースや、不具合やセキュリティ上の脆弱性などへの対応によって、市場での商品価値を維持しています。さらに、サードパーティーが革新的なアプリを提供できるエコシステムを構築することで、多様なユーザーのニーズに対応し、顧客体験を向上させています。同様のビジネスモデルが、自動車業界でも展開されてくる可能性が高いと考えられます。こうした変化により、自動車ビジネスは「モノづくり」中心から、「コトづくり」中心へと移行していくことになるのです。
また、クルマに組込むソフト次第で、クルマの機能や管理・制御条件をパーソナライズすることも可能になります。スマホにインストールしているアプリを見れば、その人の暮らしぶりや趣味・嗜好がわかるように、クルマの機能もユーザーの手でパーソナライズされることでしょう。現在でも、クルマの改造に多額のお金を注ぎ込む趣味人がいますが、より多くのユーザーがソフトで気軽にパーソナライズすることになりそうです。IoTを利用して、運転者の情報を自動収集し、効率的かつ安全にクルマを操る制御を実現できる機能やサービスも発展していくことが予想されます。
こうした仕組みを応用することにより、ドライバーや搭乗者の交代、走行環境や場所、時間の変化に応じて、クルマの機能や制御条件をキメ細かく変更して最適化することが可能になるでしょう。クルマをシェアリングする場合にも、利用者に応じて、乗り心地や運転の好みをカスタマイズすることができる可能性があります。
クルマの開発形態は、「ウォーターフォール型」から「アジャイル型」へ
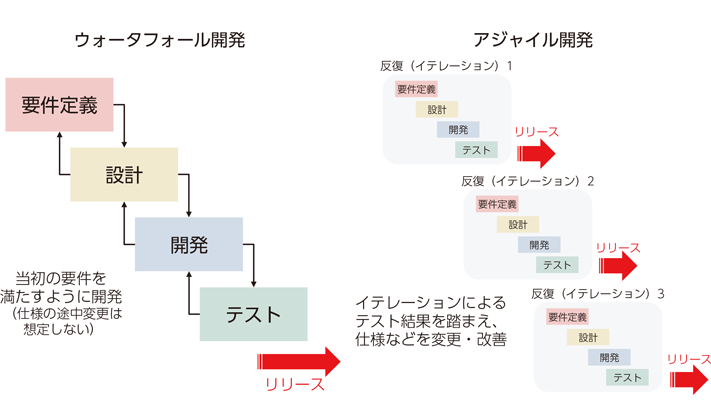
現在、SDVを先行して開発している新興メーカーは、既存の自動車メーカーとは異なる開発文化とR &Dの組織を持っています。最大の違いは、クルマの「アジャイル型開発」を採用している点です。これまでの自動車メーカーは、クルマを工場から出荷する際に、価値と完成度を確保すべき商品として捉え、従来の「ウォーターフォール型開発」を進めてきました。
21世紀以降の自動車開発では、安全性の高い高品質なクルマを効率的に開発するために、「モデルベース開発(MBD)」が行われています。クルマの機能・構造をデジタルデータで表現したモデルを作り、製品企画から基本設計、詳細設計へと段階的に詳細化していく手法です。このMBDも、基本的にはウォーターフォール型開発であると言えます。SDVで求められるアジャイル型開発は、現在のMBDとの整合性を維持しながら導入していく必要があります。こうした開発手法の刷新は、自動車業界にとって、発想の枠組みを大きく変える必要に迫られるチャレンジとなることでしょう。
近年、日本メーカーもアジャイル型開発に対応できる体制の確立を急いでいます。例えば、トヨタ自動車は2023年10月に、ソフト関連の技術とビジネスの一体開発を推進する組織「デジタルソフト開発センター」を新設しました。ここでは商品企画・事業、アプリケーション開発、ソフト・プラットフォーム開発、電子プラットフォーム開発を一体化させ、プラットフォームとエコシステムの構築を推し進めています。
SDVで車載情報システムの構成が分散型から集中型へと刷新
SDVによって、クルマに搭載する情報システムの構造も大きく変わることになります。自動車開発に投入されるOSやミドルウェアなどの仕様はもとより、車載ネットワーク技術や半導体、ケーブルなどのハードウェアの仕様も、これまでとはガラリと変わることでしょう。
従来型のクルマでは、機構を動かすアクチュエータや情報を収集するセンサーなどが分散配置され、それぞれに小さなマイコンを付随させて管理・制御・情報処理を行ってきました。処理対象ごとに最適なマイコンを利用することで、効率的な操作が可能であると考えられていたからです。こうした発想のもと、近年のクルマでは、1台あたり100個以上のマイコンを搭載する車種も多く見られるようになりました。
これに対応するため、直近で市場投入されるクルマには、「ドメインアーキテクチャ」と呼ばれる、複数の電子制御システム間での連携動作を効率化するE/Eアーキテクチャの採用が始まっています。AIによる映像データの収集や走行環境の把握、ブレーキの自動制御システムなどで構成されるADASなど、多様なデータが発生するシステムに対応したネットワーク構成です。このドメイン型では、CAN、LIN、MOST、FlexRayなど、技術仕様と応用適性の異なる多様な車載ネットワーク技術を併用。それぞれのシステムの機能・性能に応じて最適なネットワークを使い分けて接続し、相互連携させています。
しかしSDVでは、最新のクルマで採用されているこのドメイン型を、さらに進んだゾーン型へと進化させる必要が生じてきています。
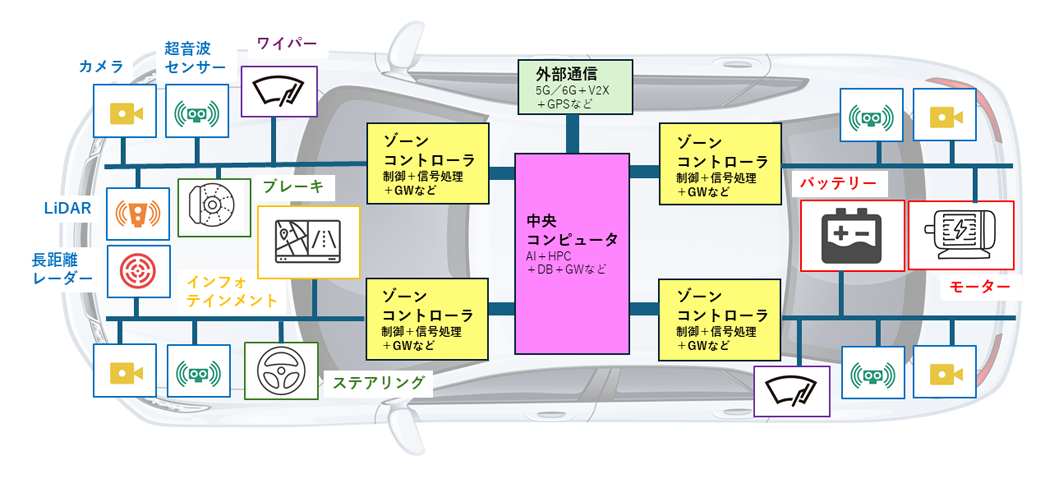
「ゾーンアーキテクチャ」では、中央コンピュータとゾーンコントローラに多くの情報処理を集中させることで、ソフトウェアの動作プラットフォームを一元化。アプリケーションの管理や処理が容易になります。
自動運転用ソフトなどの処理では、画像処理などの情報系のタスクと、ステアリング操作などの制御系のタスクなど、異なるタスクの連携が必須となり、それぞれをキッチリと管理する仕組みが必要になります。数多くのマイコンにタスクを分担処理させるよりも、中央の高性能コンピュータ内で一括処理した方が、効率的で信頼性の高い処理が可能になります。
SDV固有の特徴であるアプリケーションの追加・更新を行う際も、ドメイン型のままでは、数多くのマイコンそれぞれのソフトを個別に変更する必要が出てきます。こうした更新システムの構成は、極めて複雑なものになります。 また、ゾーン型で車載ネットワークの標準をEthernet系に統一すれば、同じケーブルを使って、用途の異なるプロトコルを混在させて転送できるようになります。その結果、ネットワーク構成を単純化して引き回すケーブルを短くすることが可能になります。分散配置されたセンサーやアクチュエータなどに、IPアドレスでプロトコル変換不要のアクセスも可能になります。
カメラやセンサーなど、車両内に分散配置しなければならないデバイスが増え続けています。これらのデバイスを機能ごとに分別して、ドメイン型で個別仕様のネットワークで接続すると、多種多様な専用ケーブルを多く引き回すことになり、車両重量の増加やコスト増を招いてしまいます。
SDV化に伴い、これらの問題を解決するために検討されているのがゾーンアーキテクチャなのです。
ただし、SDVにおいては、ハードウェアやネットワークの構成が単純化される一方で、ソフトウェアはより大規模で複雑になると考えられます。セキュリティ対策の強化など、新たな課題にも対応していく必要があります。今後、自動車向けのソフトウェア技術は、ニーズとシーズの両面でますます高度化していくことになりそうです。
※このWebサイトで使用している会社名や製品名は各社の登録商標または商標です。
※本文中に™ および ® マークは表記していません。
プロフィール
伊藤 元昭氏 株式会社エンライト 代表
技術者として3年間の半導体開発、日経マイクロデバイスや日経エレクトロニクス、日経BP半導体リサーチなどの記者・デスク・編集長として12年間のジャーナリスト活動、コンサルタントとして6年間のメーカー事業支援活動などを経て、2014年に独立して株式会社 エンライトを設立。