特徴・機能
RAMScope-EXG
制御アルゴリズム検証のための
マルチ計測・適合ツール:GT170シリーズ

機能・特徴 (計測システム)
リアルタイムに制御ソフトウェアデータの変化と周辺IF状態を「まるごと計測」、システム機能・性能の妥当性を確認!
主な特長
- 制御アルゴリズムの内部変数をリアルタイムにモニタ&チューニングが可能です(※)
(見える化の効果:変数の不測性な変動、不安定性・非線形性の影響度)
※制御ソフトウェアに対して計測によるソフトの負荷を与えません(常駐ソフト不要) - 段階的なテストの要件に応じて「組み合わせ可能」なマルチ計測
計測モジュールの種類:変数計測・適合(RAMモニタ)、アナログ計測、CAN通信
計測モジュールは最大10モジュール(電源・通信モジュールを含む)まで拡張可能 - 複数の測定モジュールが同期計測可能なマルチシステム
- テストシナリオ機能を装備(変数値にシナリオデータ注入、CAN疑似送信)
- リプログラム(FROM書き換え)から動作評価の計測・収録が1台で賄える
- システムの最適化を図る適合機能(パラメータチューニング)にも対応
- 測定モジュールの機能強化(最新化:対GT150シリーズ)
アナログ信号計測(入力が最大1000Vまで)、CAN計測(CANFDにも対応) - HOST通信IFの高速化(GbEthernet/USB3.0)・堅牢性、耐ノイズ性を強化
ターゲットGND絶縁により高電圧駆動モータ環境でも計測可(多数の実績) - ASAM標準規格(国際的な標準化団体)に対応(測定:MDF・設定データ:A2L)
測定通信プロトコルのXCP対応(ASAM MCD-1 XCP)
計測データの親和性対応と他社適合ツール・HILSツールとの連携可能
リプログ~変数計測・適合の検証手順(実機検証:RAM計測モジュール)
単体~システム検証から製品化の妥当性確認までのプロセスに対応
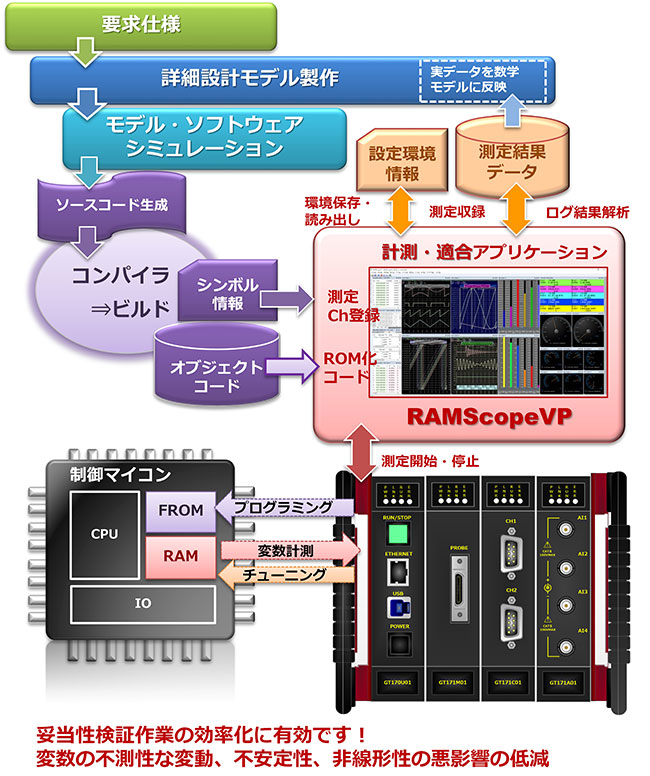
「シミュレーション・モデルから量産コードをビルド、オブジェクトコードに生成」「オブジェクトコード(ROM化)をRAMScopeで実機ダウンロード」「制御ソフト変数の挙動をオシロスコープのように観測」「パラメータテーブルのチューニング後の挙動をリアルタイムに計測」
「収録結果を数理データとしてシミュレーションモデルに反映」
制御ソフトウェア開発では抽象度が高いモデルベース開発(MBD)の利用が多く、設計上でシミュレーションを併用して論理検証を行います。その後の量産コードに向けた実装モデルを検証する手順を紹介します。要求仕様から制御設計で制御アルゴリズムをモデル化し、モデルシミュレーションによって制御仕様の妥当性確認して制御ソフトウェアを確定します。制御ソフトウェアを制御マイコンに実装するプラットフォーム(IOドライバーレベル等)とインタフェースし、量産コードに向けたソースコードを生成します。
実機検証を行うには、量産コードに向けたソースコードを実装マイコンに応じたコンパイラ・ビルドを含む統合開発環境でROM化するオブジェクトコードを生成します。この量産コードの計測・適合に必要な変数やパラメータ情報を抽出します。実機テストによる計測結果をシミュレーションモデルと比較し、制御モデルに取得データを反映させて協調検証環境の充実化を図れます。
実機検証には、マイコンに応じたコンパイラ・ビルドを含む統合開発環境で生成後のソースコードをROM化するオブジェクトコードと計測・適合に必要な変数・パラメータのシンボル情報を利用します。
【RAMScopeによる実機検証の手順<例>】
- コンパイル情報から制御アルゴリズム変数情報(シンボル情報)を参照、計測チャンネルに登録
(設定環境をプロジェクトファイル保存可能) - 制御マイコンの内蔵FROMにオブジェクトコードをプログラミング
- 実機ターゲット(制御マイコン)のリスタート
- 変数計測の実行:変数変化の観測表示、HOST-HDD収録(記録)、測定終了・停止
- 測定結果の解析(タイミング計測による性能観測、アルゴリズム動作結果から機能・状態遷移を観測など)
(ex:テスト検証 関数入力変数(同値、境界値)⇒関数出力結果の観測) - 測定結果の保存(BIN,CSV,MDF)、データ複写によるテストレポートの作成
- 適合パラメータの表示・編集、適合値チューニング⇒ 適合後の制御動作を計測検証
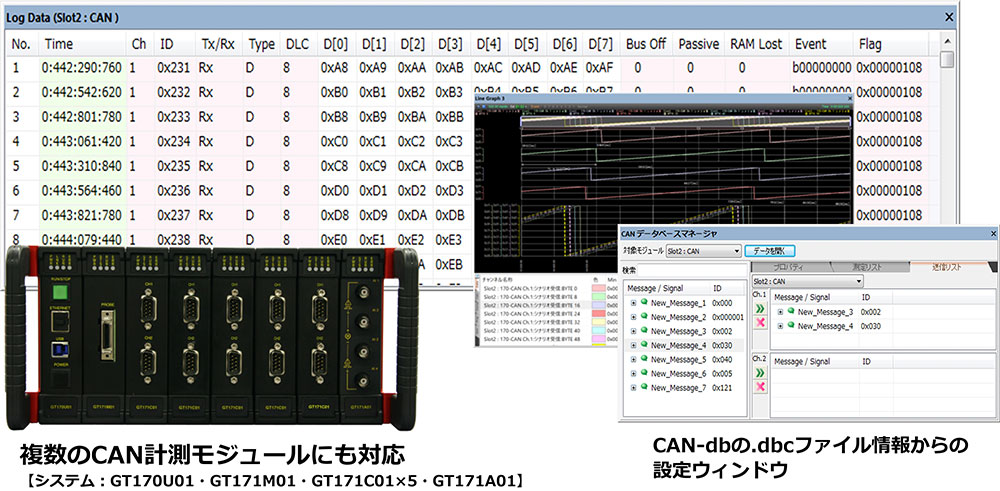
車載ネットワーク(CAN/CANFD)計測:型名GT171C01
RAMScope-EXGのCAN計測(GT171C01)では、車載ネットワーク(CAN/CANFD)通信のバスモニタ計測と疑似送信が可能なインタフェースを2チャンネル装備した計測モジュールを用意しております。CAN/CANFD通信のモニタ計測と疑似送信は、検証作業の要求に応じて上位アプリで切り替えが可能です。CANデータのメッセージ上のシグナル定義は、個別設定からベクター社のCANdbで定義されたファイル(.dbc)の参照登録までを容易に行えます。疑似送信は、予めに用意したデータパターンの送信シナリオの作成ができます。開発途上のノード代替、通信負荷試験などに活用できます。
車載ネットワーク計測と変数計測・周辺アナログ信号計測を同時に計測することで、システムテストの測定環境には有効ツールです。RAMScope-EXGの計測モジュール拡張は最大9モジュールまで増設が可能なため、車載GWなどの多チャンネルCANの計測に対応可能です。
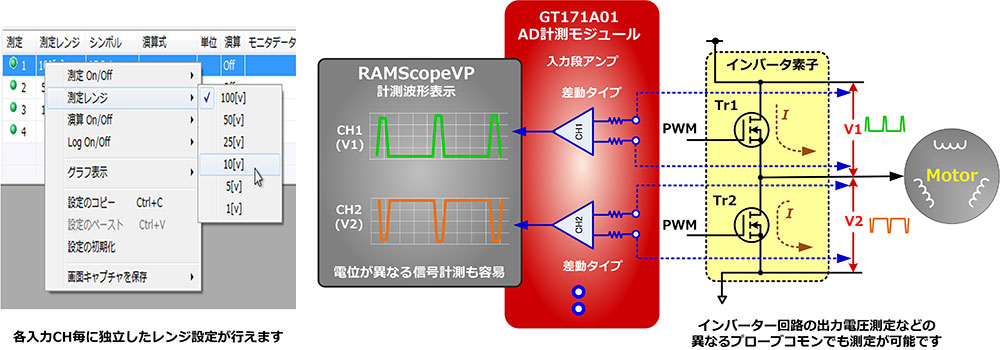
アナログ計測:型名GT171A01 (差動4CH-最大1000V対応※マルチレンジ入力)
RAMScope-EXGのA/D計測モジュール(GT171A01)は、マルチレンジ入力可能なアナログ計測(差動入力)を4チャンネル(同期)搭載したモジュールを用意しております。入力レンジの設定は、±1v~±100V(CATⅡ)の幅広いレンジに対応しており、計測アプリケーション上で選択ができます。(※10:1プローブ(耐圧)を接続することで、最大1000Vまでの測定が可能となります)計測入力が差動入力タイプのため、CH毎の電位差が異なる電圧計測にも容易で正確に計測できます。差動入力の方式は、入力コモンに生じるノイズや他CHのクロストークノイズなどのノイズ影響が受けにくい計測プロービングです。
複数の測定モジュール同期化(マルチ計測・複数ECUの協調検証)
最近の車載制御システムでは、自立した制御モジュール(エージェント)が分散し、ネットワークを通じて他の制御モジュールと相互作用を形成する自立分散協調制御システム(マルチエージェントシステム)などが注目されています。個々に分散する制御モジュール、センサーが統合制御での役割をシステム検証するには、制御動作の相互関係が判る同期計測が必要です。自立分散協調制御システムのECUに実装された制御マイコン動作は、各制御マイコン処理間での協調同期が必要となります。RAMScopeでは、各計測モジュールの同期計測が可能なため協調制御の実検証が行えます。
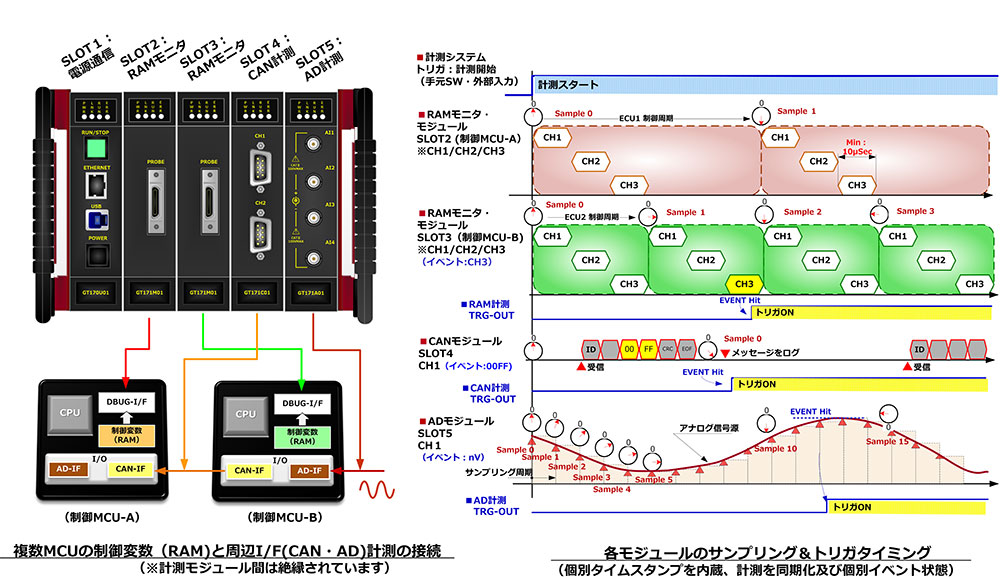
RAMScope-EXG(マルチ計測システム)の特長
- 複数マイコンの制御処理を同一時間軸で計測可能
- 並列・協調制御システムでのCAN通信・信号計測も同期化
- 指定計測モジュールのイベント機能・外部トリガーに計測制御が可能
(他のモジュールも計測動作が連動(開始・停止)) - ターゲットシステム(接続するMCU)のGNDとは絶縁(高耐圧:光素子))
コモンモードノイズの影響を低減、ターゲットシステムに影響を与えない
(モジュール間も高耐圧絶縁)
【マルチ計測システムの応用例】
- モーター組込み工作機械、産業機械、医療機械など
- 複数のモーションコントロールの並列・連動制御
- 多軸のモーター制御における協調制御
- 自動車における協調制御
- モーターアシスト:モーター駆動からエンジン駆動
- 回生制御:駆動モーターからブレーキ
- 補償制御:ステアリングからブレーキ計測モジュール間の同期化
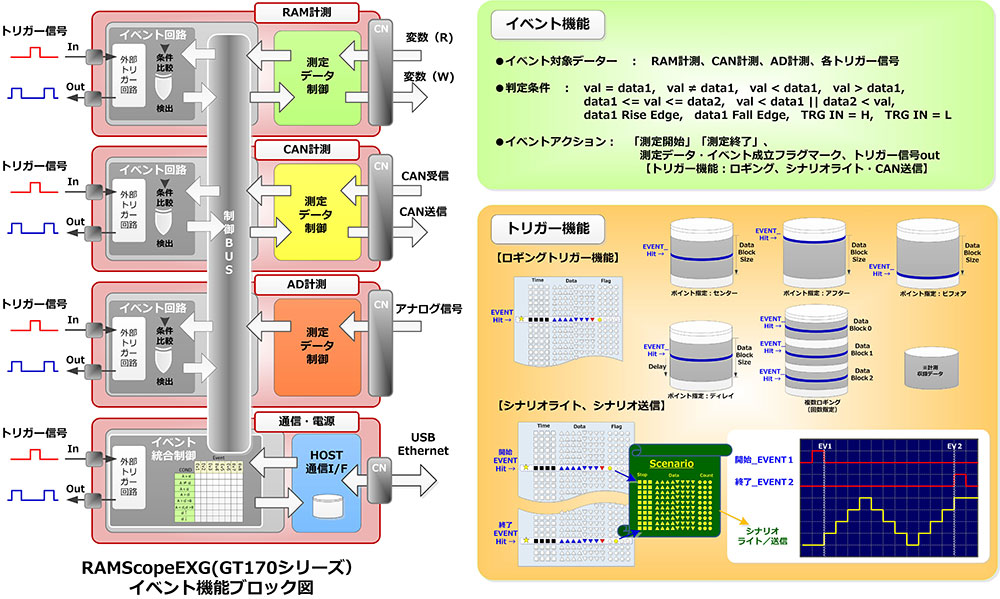
豊富なイベント機能で効率的にデータを捕捉
RAMScope-EXGでは、検証作業を効率的に測定するためにイベント機能の充実化を図っております。イベント機能は注目したい事象や特定の条件下での制御システム状態の観測に有効な機能です。、
イベント機能は検出したいデータの条件設定を行い条件が成立したタイミングで特定の機能が動作します。イベント機能の連動動作は、測定サンプルのマーキング、測定収録の開始・終了、シナリオ機能の起動・停止などに利用できます。リアルタイムにイベント条件を判定するためにイベント検出を各モジュールに搭載しております。
他の測定環境およびターゲットシステムと連携するために、各モジュールに外部トリガー入力・出力端子を備えています。
外部トリガーは、イベント機能条件入力、イベント出力となります。または計測のサンプル制御としても利用することが可能です。各測定モジュール毎に独立して機能が働きます。
計測シーンに応じたモジュール組み合わせと自在な設置構造
検証シーン、計測ニーズに応じて計測モジュールを自由に組み合わせることが可能です。後から購入追加の組み合わせでも拡張ができます。
最大10モジュール(電源・通信を含む)まで。さまざまな検証・評価環境にも対応可能な自在で堅牢な構造です。
