モーター制御機器の実機検証(ベクトル制御の可視化)
ベクトル制御アルゴリズムを動的に可視化
(制御周期のモーター特性変化を捕捉:
制御変数の挙動を高速定周期にサンプル測定)
家電や車載関連では多くのブラシレスDCモーターが使われています。モーター駆動には制御用マイコンが制御演算を行い、演算結果に応じて周辺機能のPWM出力(Pulse Width Modulation)がインバータ(IGBTなど)をスイッチングしモーターの電力制御を行います。
モーターの制御演算はベクトル制御技術が主流です。
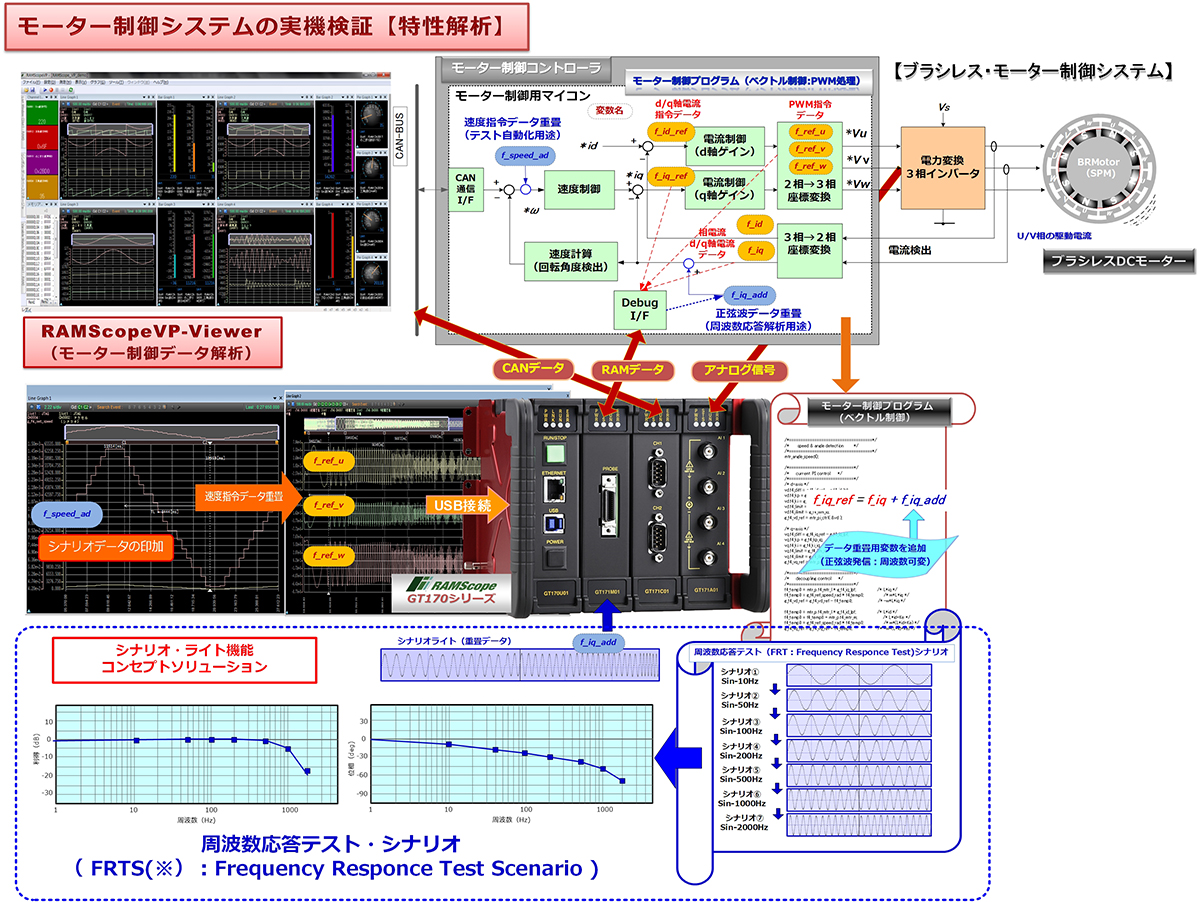
ベクトル制御ではモーター電流(d軸/q軸)を周期的に検出し、電流・トルクなどの演算処理を行い、三相インバータ(U相/V相/W相)に与えるPWM出力を瞬時に定めています。RAMScopeでは、PWMキャリア周期が10KHz(周期100μsec)の場合には、ベクトル制御の内部変数(d軸・q軸、u相,v相,w相など)をリアルタイムに10点程度の変数変化を計測・収録が可能です。周辺のインバータ電流・トルクセンサーからのアナログ信号や外部からの指令情報のCAN通信も同時計測が可能です。
テスト支援機能(シナリオ・ライト)を応用してトルク指令変数に疑似データを注入し、システムの応答試験や繰り返し変化テストなどの耐久試験に応用することもできます。
※FRTS:テスト支援機能を応用して制御の応答特性・安定性の周波数応答検証も容易に実現できます。
(制御ループ内に正弦波の振幅データを重畳し、帰還変数の変化を計測することが可能となります。)