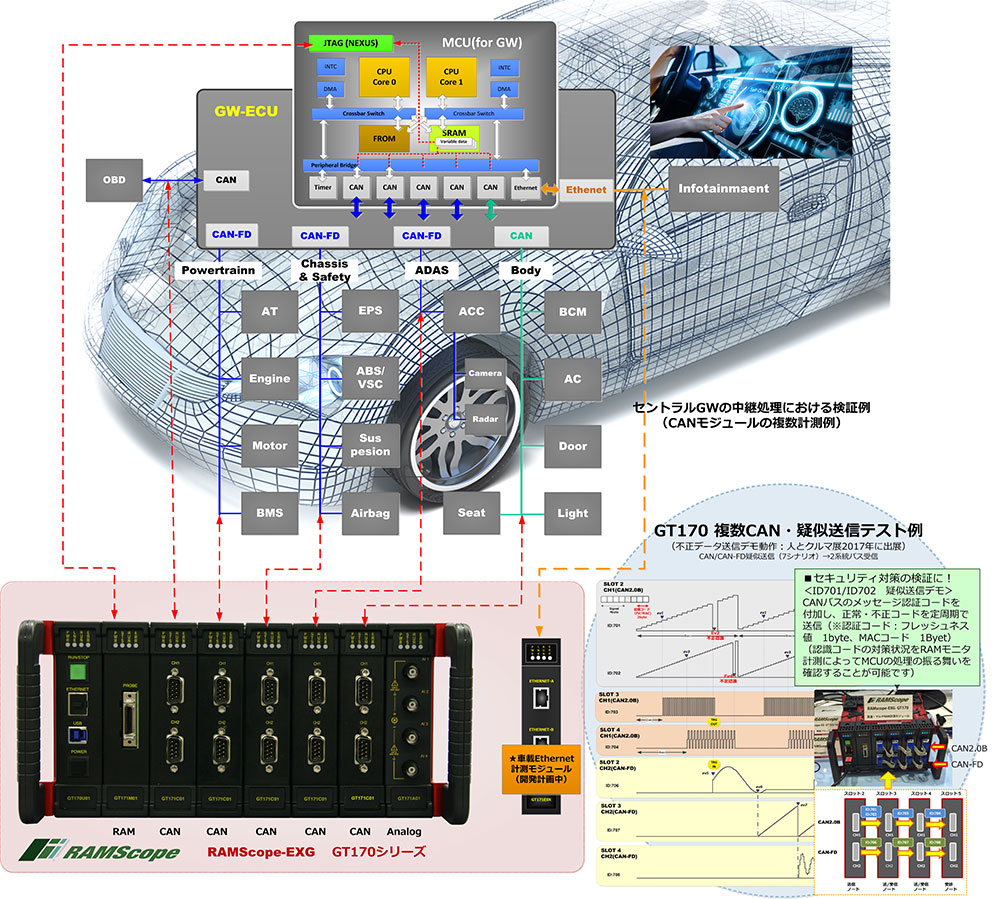
セントラルGW・複数CANの実機検証ツール
複数CAN通信(CAN/CAN-FD)を同時刻で同期計測、GW-ECU内マイコンの内部処理(中継・セキュア対策)の振る舞いも同時にモニタ・ログが可能となります。

「コネクテッドカー」・「自動運転」の実現に向けて、車両ネットワークシステムは高度化・信頼性の向上が課題となっています。これまでの車両ネットワークのゲートウェイは、機能毎にECUのネットワークを束ねる構成でしたが、最近の車両ネットワーク構成では制御群となるドメインごとにハブ化し、多チャンネルの車両データを管理する「セントラルゲートウェイ」が導入されています。
高度化するECU間の協調制御を実現する先進運転支援システム(ADAS)~自動運転では、ゲートウェイの中継処理がECU間の通信遅延時間の保証や、機能仕様の追加・変更にも耐えられる中継ソフトウェア制御が課題となります。セントラルゲートウェイの役割は、中継機能およびECU間の調停処理以外にも、コネクテッドカーの要件となるECUソフトウェアのアップデートする機能(OTA)、インフォテインメント経由でインターネットから外界に接続し遠隔で車両診断する機能などが計画されています。基幹となるゲートウエイは、外界からの悪意のある脅威に対してセキュア対策を装備し、不正な侵入をブロックする役割も担っています。そのためにセキュア対策の防御システムを検証することも課題となります。
RAMScope-EXGでは、セントラルゲートウェイ用マイコンの制御処理の挙動観測(変数計測)できるRAMモニタモジュールと合わせて、車載ネットワークのCAN/CAN-FD通信を観測するCANモジュールを複数計測が可能です。複数計測モジュールの同期計測の実現によって、車両ネットワークのリアルタイムな協調処理、ゲートウェイ内部処理のパフェ―マンスなどを捕捉することができます。また、CAN/CAN-FDメッセージを疑似的な不正なメッセージパターンを構築しシナリオ送信することも可能です。是非、セキュア対策の検証環境にもRAMScope-EXG(GT170シリーズ)をご利用ください。